Irobhothi yokuWelda yeMig ekumgangatho ophezulu yaseTshayina yokuWelda intsimbi engagqwaliyo







Umzimba weRobhothi
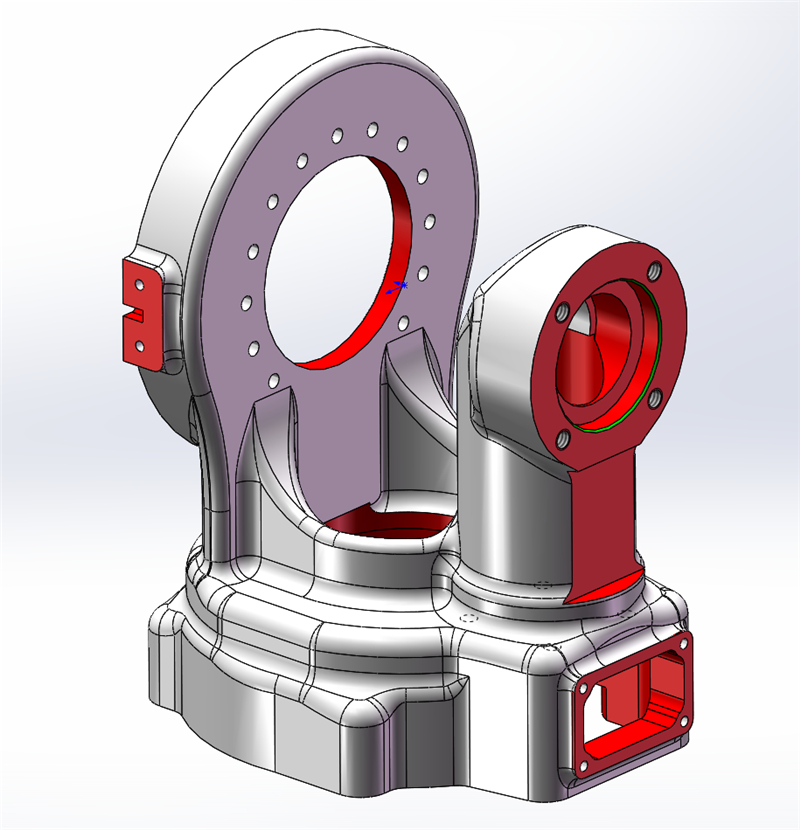
Irobhothi ye-JHY itshintsha kakhulu inkqubo yokwenziwa kwe-die-casting kunye noyilo lweenkcukacha zomzimba, Iqela lethu le-R&D lenze izinto ezininzi ezintsha kuyilo lomzimba werobhothi, linamalungelo obunikazi angaphezu kweshumi amatsha okuyila.
Umzekelo, i-axis yesithandathu iphuhlise indlela yokudlulisa echanekileyo kakhulu kwaye iyilwe ngemivalo yokuqinisa, kwaye idiski yesiphumo sevili lesithandathu isebenzisa uyilo olungenagiya, oluphucule kakhulu ukuchaneka nokuzinza kwerobhothi. Nokuba itotshi yokuwelda isebenza kwimeko enzima, isenokuqinisekisa uzinzo kwaye ngaphandle kokushukuma. Eli nqaku liqinisekiswe ngabathengi bethu basekhaya.
Umzimba werobhothi uveliswa yitekhnoloji yokusika iirobhothi nge-die-casting, oku kwenza iirobhothi zethu ezinobunzima obuphezulu, zibe lula. Ingalo yangaphambili inokuba mfutshane kwaye ibe nde, Umlinganiselo phakathi kwengalo ephezulu nengalo yangaphambili usondele kumlinganiselo wegolide, ngoko ke ukuhamba kuguquguquka ngakumbi kwaye kukhawuleze.
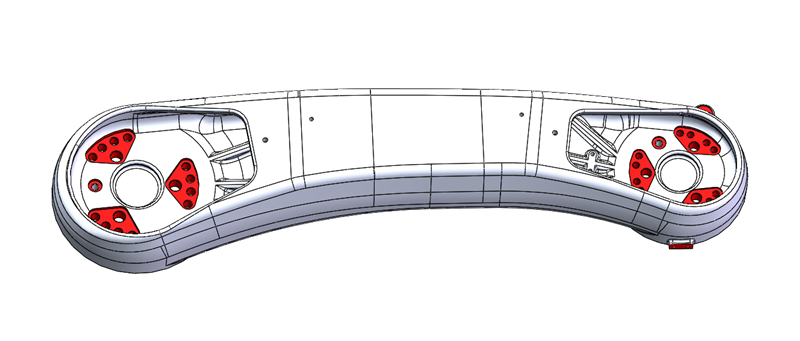
Uyilo lweSakhelo
Uyilo lwengalo yangaphambili yerobhothi ethe tye lulula kwaye lunobuhle. Ngombono woyilo, luhambelana ngakumbi nobuhle bemarike yaseYurophu. Uyilo lomzimba werobhothi lufake izicelo zeepatenti zobugcisa ezininzi, umzimba omtsha werobhothi ugqibelele ngakumbi.
Uhlobo Oluphezulu Lweentambo
Iingcingo zangaphakathi kunye neetheminali zerobhothi zenziwe ziimpawu eziphambili zaseJapan: iDYEDEN, iTAIYO, ezifana neABB kunye neFanuc.
Isiphelo sendlela: Uphawu lwe-Italian Yierma.
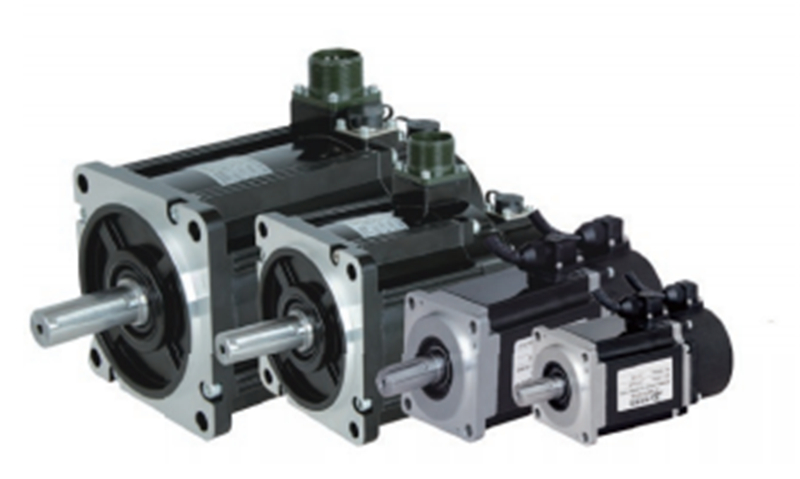
Iimpawu eziphambili zeServo Motor / Driver / Reducer
Zonke zamkela iimpawu eziphambili eTshayina. Uphawu ngalunye luye lwavavanywa kwaye lwaphandwa ixesha elide ngaphambi kokuba kwenziwe isigqibo sokugqibela, ukuze kuqinisekiswe ukuba ezi mpawu zifanelekile ukusetyenziswa ziirobhothi zethu kwaye umgangatho kunye nokusebenza kwazo kuzinzile kwaye kuthembekile.
I-axis ye-J1 kunye ne-J2 zamkela uyilo lweeshafti ezintathu ezingaqhelekanga ezine-torque ukuya kuthi ga kwi-65 Nm ezinciphisa ukuguguleka kwegiya kwaye zonyusa ubomi benkonzo ye-reducer. Ii-reducer ze-JHY robot J1 kunye ne-J3 axis okwangoku zezona ziphezulu eTshayina.
Malunga ne-servo motor, Ngoku sisebenzisa i-3kw ubuninzi kwiirobhothi.
Kwiirobhothi eziyi-1.8m kunye ne-2m, amandla okuqhuba afunekayo kwi-axes yoku-1 neyesi-2 makhulu, kwaye neemfuno zamandla emoto nazo ziphezulu.
Iimoto ezichanekileyo kakhulu nezineenkcukacha ezininzi zinokuhlangabezana ngokupheleleyo neemfuno zerobhothi yethu.

Iminyaka emi-3/7500h Akukho kulungiswa
Ukugcinwa kulula, abathengi ngokwabo banokusebenza ngokulula.
Ezinye iiPatents kunye noYilo
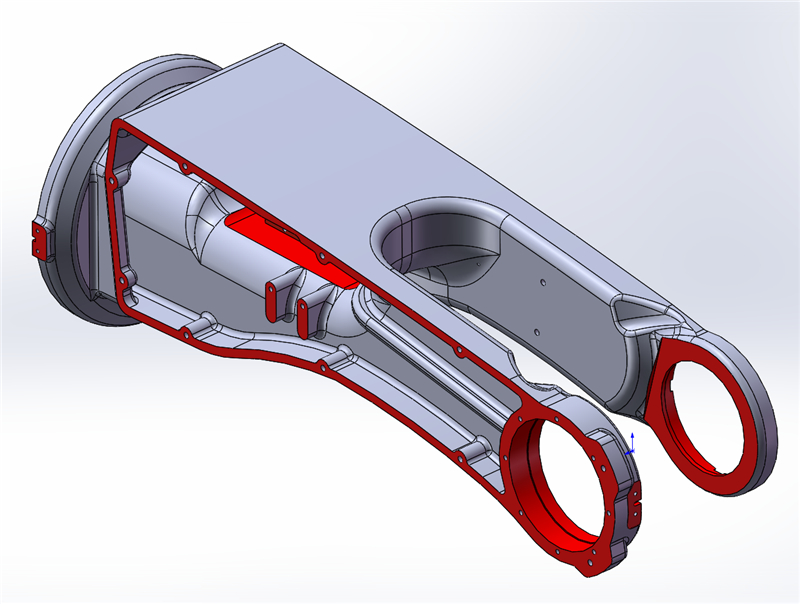
Uthumelo lwesibini olune-axis ezi-6 lutshintshele kwiikhonkco ezimbini zebhanti, lwandisa umlinganiselo wothumelo, lwaza lwasombulula ingxaki yokuhamba ngokukhawuleza kakhulu nokungachanekanga kwe-axis ezi-6. Idiski yokukhupha ye-axis ezi-6 yenzelwe ngaphandle kweegiya, enendlela yothumelo echanekileyo, ephucula ukuchaneka kokuhamba kwe-axis ezi-6... Okwangoku sineepatenti ezingaphezulu kwama-30 ezinxulumene nerobhothi yokuwelda.
Ividiyo
Iiparameters
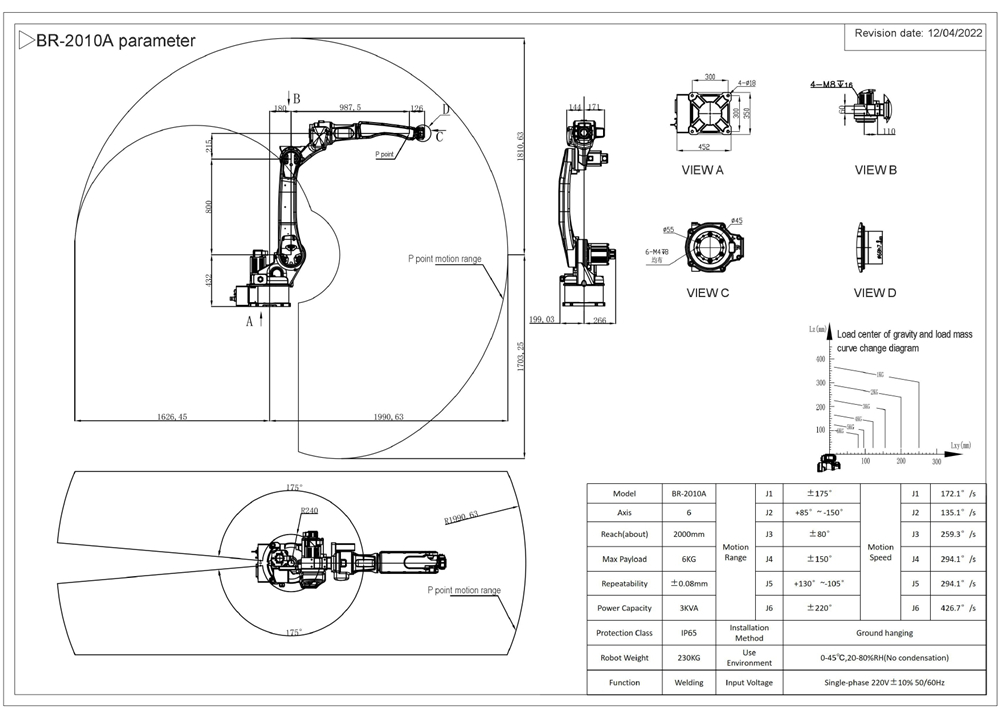
| Imodeli | I-BR-2010A | Uluhlu lweNtshukumo | J1 | ±175° | Isantya seNtshukumo | J1 | 172.1°/s |
| I-axis | 6 | J2 | +85°~ -150° | J2 | 135.1°/s | ||
| Fikelela(malunga) | 2000mm | J3 | ±80° | J3 | 259.3°/s | ||
| Umthwalo Omkhulu Wokuhlawula | 6KG | J4 | ±150° | J4 | 294.1°/s | ||
| Ukuphindaphinda | ± 0.08mm | J5 | +130°~-105° | J5 | 294.1°/s | ||
| Amandla oMbane | 3KVA | J6 | ±220° | J6 | 426.7°/s | ||
| Iklasi yoKhuselo | IP65 | Indlela Yokufaka | Ukuxhoma emhlabeni | ||||
| Ubunzima beRobhothi | 230KG | Sebenzisa Indawo Ohlala Kuyo | 0-45℃, 20-80%RH (Akukho kufuma) | ||||
| Umsebenzi | Ukuwelda | I-Voltage yokufaka | Isigaba esinye 220V ± 10% 50/60Hz | ||||
Iindidi zemveliso
-

Uluhlu lweeRobhothi zokuWelda ze-MIG ezi-6 ze-Axis Low Spatter 1800mm
-

Uluhlu lweeRobhothi zokuWelda ze-Axis MIG MAG ezi-6 eziyi-1500mm ezine ...
-

Irobhothi yokuwelda esemgangathweni ophezulu esetyenziselwa ukuwelda ifenitshala
-

I-JHY 6 axis robot arm industrial automatic arc m ...
-

Irobhothi yokuwelda yokufikelela engama-2000mm yokuwelda i-carbon s ...
-

Irobhothi yokuwelda ye-MIG enobubanzi obuyi-2000mm yee-stainles ...